VR之家消息:随着摄像头与算法技术不断发展,3D扫描已经应用于越来越多的领域,比如:3D商品预览、数字博物馆、生物识别、容积捕捉、AR、VR、自动驾驶汽车的环境识别、机器人等。
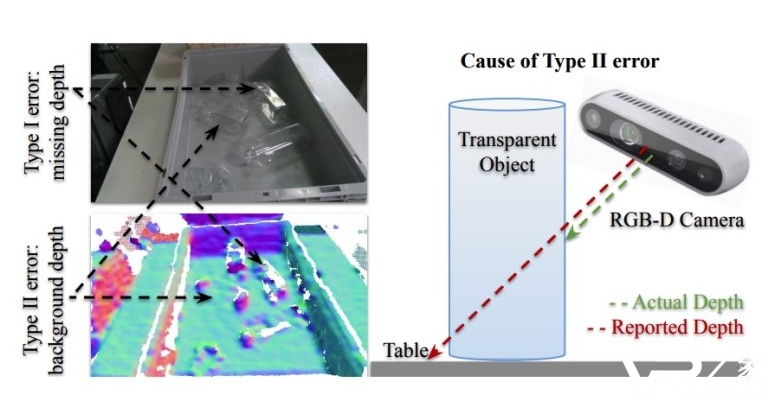
与人的视觉不同,目前3D扫描还不能清晰识别所有表面或颜色,黑色或反光表面通常比较难以识别,而玻璃罐等高透明度的物体更是容易完全被忽略。
这是因为,3D传感器的算法会假定所有物体的表面都符合理想散射(Lambertian,指的是能够向所有方向均匀反光)规律,这也是为什么很多3D扫描数据从多个角度看亮度都一样。而高透明度的物体并不遵循这一规律,它的表面在反光同时,也会折射光线,因此大多数高透明度物体的深度数据并不可用或是包含无法预测的噪点。
为了解决这一问题,谷歌科研人员与Synthesis AI和哥伦比亚大学合作开发了一款名为ClearGrasp的机器学习算法,特点是能通过RGB-D摄像头准确预测高透明度物体的3D数据。与以往的其他方案相比,ClearGrasp优势在于不需要提前了解所扫描物体的3D数据,遇到从未见过的新物体也能进行扫描。
据悉,通常训练深度学习模型需要使用大量数据,但科研人员发现,包括常用的Matterport3D和ScanNet等市面上常见的数据集,并不包含高透明物体的3D数据,因为人工标记的成本高,耗时也久。
于是,谷歌自己创建了一个包含5万个以上逼真合成图的数据集,每张图中包含不多于五个高透明度物体,数据中包含曲面法线、分割掩模、边缘和深度等训练2D/3D识别任务所需的信息。
以上就是小编为大家带来的谷歌研发出可识别高透明度物体的3D扫描算法的介绍,想要了解更多VR资讯请关注本站。下载盒子即可享受一键下载游戏、搜索礼包、查找攻略等一站式服务,喜欢玩破解版的玩家就下载【破解游戏盒子】
更多精彩软件APP尽在热门APP大全